|
|
|
|
|


|
|
|
|
|
|
|
|
|
|
|
Emulador de cerradura de caja fuerte con un motor de pasos 28BYJ-48, de 4 fases y el sistema Bolt 18F2550Autor: Mario Sotres Cataño
1. Introducción: Cuando se desarrollan aplicaciones en donde se requiere realizar control de velocidad ó posición de mecanismos con cargas inerciales chicas, y baja velocidad de funcionamiento, los llamados motores de paso (stepper motors) son los más simples de utilizar, debido a que -adicionalmente a su bajo costo- su interfaz con los sistemas microcontroladores es sencilla, y se realiza totalmente por medio de señales digitales. A diferencia de los servomotores (que requieren control de malla cerrada), el motor de pasos no requiere de señales de retroalimentación para determinar su posición. Por ejemplo, en el motor mostrado en la figura 2, su posición angular puede ajustarse con una precisión de 0.088°. Entre las aplicaciones típicas de los motores de paso, pueden mencionarse los mecanismos limpia parabrisas en automóviles, el control de compuertas ó válvulas y en general la robótica de cargas ligeras. En el desarrollo del presente proyecto, se construyó un prototipo de madera de una caja fuerte (Figura 1). La función del motor en este caso es cerrar ó abrir la cerradura de la caja, mediante el movimiento angular de un pasador (Figura 6), cuando el usuario teclea el código de seguridad. El objetivo del proyecto es didáctico y demostrativo y permite evaluar la facilidad con que pueden operarse los motores de paso por medio de microcontroladores. En este caso, se utilizó el sistema microcontrolador Bolt 18F2550, acompañado de un teclado y un LCD de 16 x 1 caracteres, así como el motor de pasos 28BYJ-48, conectado a una tarjeta de drivers del tipo darlington ULN2003, con alta capacidad de suministro de corriente, como se muestra en la figura 2.
Figura 1: Prototipo de caja fuerte hecho en madera, con alimentación de pila recargable.
Figura 2: Motor de pasos 28BYJ-48 de 4 fases, con tarjeta de interfaz de drivers darlington ULN2003 para el manejo de las bobinas del motor.
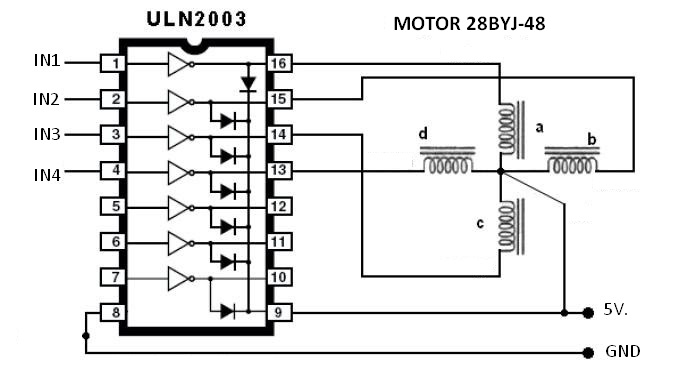
2. Descripción general: Para controlar el motor de pasos desde el sistema Bolt, con base en la figura 3, las señales de los drivers (IN4..IN1) en la tarjeta ULN2003, así como la alimentación de 5v y GND se conectan al puerto auxiliar del sistema Bolt 18F2550 en el orden mostrado. Todos los dip switches de la tarjeta Bolt (módulo de color azul) deben estar en la posición OFF para evitar interferir con las señales de control. Tanto el teclado como el LCD se conectan a sus puertos respectivos en la tarjeta Bolt. La alimentación general del sistema puede realizarse por medio de una pila recargable conectada al puerto USB, como la mostrada en la figura 1, ó bien utilizando un adaptador AC/DC externo. En ambos casos, la corriente máxima que toma el motor, alimentado a 5 volts, es de aproximadamente 250 ma. La corriente total consumida por todo el sistema es de unos 350 miliamperes. En el diagrama de la figura 4, puede apreciarse la manera como se conectan cada una de las 4 fases del motor, utilizando los drivers darlington ULN2003 de alta capacidad de corriente. Observe como las 4 fases tienen un punto común que es conectado a 5 volts.
Figura 3: Diagrama de bloques del sistema.
Figura 4: Manejo de las 4 fases del motor por medio de las señales IN4...IN1.
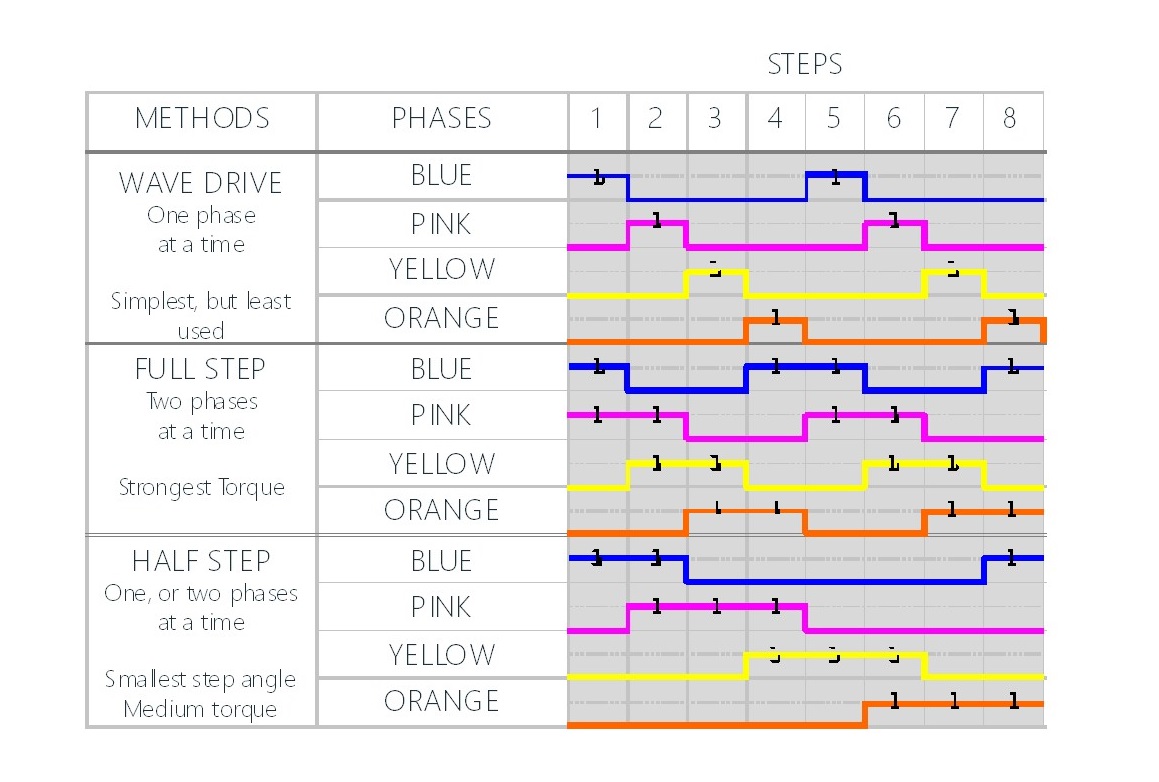
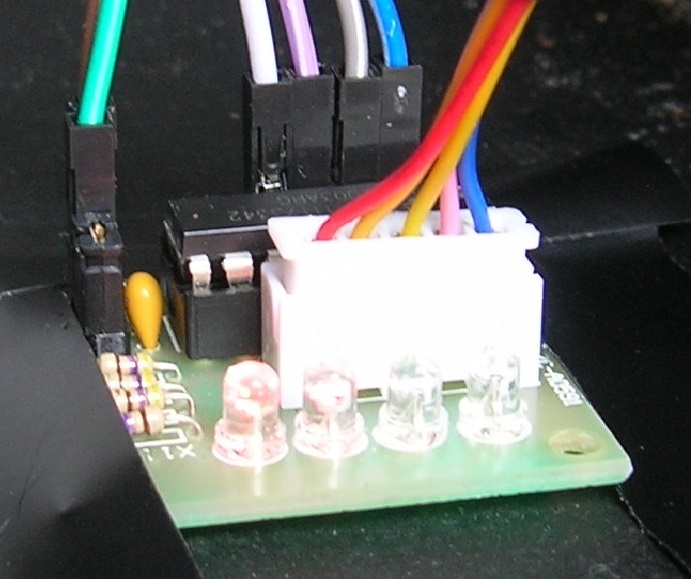
3. Métodos de control del motor de pasos 28BYJ-48: Utilizando las 4 señales de control conectadas a su puerto auxiliar (IN4..IN1), el microcontrolador puede energizar cada una de las fases. El período mínimo recomendado por el fabricante durante el cual deben energizarse las bobinas para generar un paso, es de aproximadamente 10 ms, es decir el motor girará a una velocidad máxima de 100 pasos por segundo. En el caso del motor 28YJ-48, entre el eje del motor y el rotor, hay un mecanismo de engranes con una relación 1:64. Este mecanismo proporciona por un lado un mayor par (torque) de salida, al tiempo que aumenta la precisión de giro del motor. Por otro lado, como desventaja, se pierde velocidad de giro, ya que para una vuelta completa de 360°, se requerirán 2048 pasos, como se explica abajo. En la tabla de la figura 5 se muestran los 3 distintos modos de control aplicables. En cada caso, el par ('torque' en inglés) y el ángulo de giro del motor son distintos. Para cambiar la dirección de giro del motor, debe invertirse la secuencia de activación de cada fase. El modo conocido como 'wave drive' es el más simple, ya que se energizan una a una, en forma secuencial, cada una de las fases. El par en este caso es mínimo. Se requieren 2048 pasos para un giro completo (360°) del rotor y cada paso contribuye a un giro de 0.18°. En el modo 'full step', se energizan en cada paso 2 fases en forma simultánea y se obtiene de esta forma un par máximo. Se requieren 2048 pasos para un giro completo (360°) del rotor y cada paso contribuye a un giro de 0.18°. En el modo 'half step', el par es de media capacidad y se requieren un total de 4096 pasos para una vuelta completa del rotor, con un ángulo de 0.088° por paso, es decir, la máxima precisión. Observe que en la tarjeta interfaz de los drivers (figura 2), hay 4 leds testigos que facilitan la tarea de programación al proporcionar una realimentación visual del estado de cada una de las fases.
Figura 5: Modos de control del motor de pasos 28BYJ-48 (ilustración de Microsoft).
4. Firmware del funcionamiento del sistema de apertura de chapa de caja fuerte. El programa (firmware) cargado en el Bolt fue desarrollado en lenguaje ANSI C, con el compilador C18 y con la herramienta de desarrollo MPLAB-IDE y cuenta con 3 funciones: - Dar de alta la nueva clave de usuario (4 dígitos) para abrir y cerrar la caja. - Abrir la puerta de la caja tecleando esta clave - Cerrar la puerta tecleando la clave.
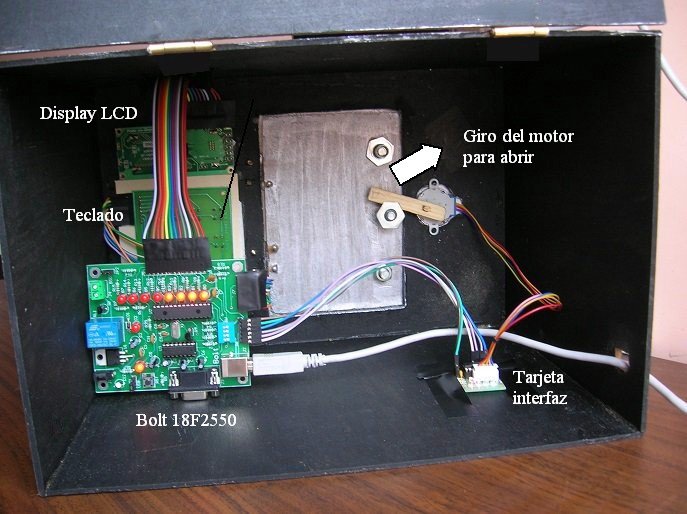
Figura 6. Vista interior de la caja fuerte y sus dispositivos.
Figura 7: Vista a detalle de la tarjeta de interfaz ULN2003 con los cables de interconexión.
Documentación adicional: |