|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Tarjeta para control de 3 relevadores y 3 entradas de botones push button, para PIC 16F628 ó 16F88 |
Desarrollado por Moisés Rafael Gutiérrez Damián para Punto Flotante, S.A.
|
|
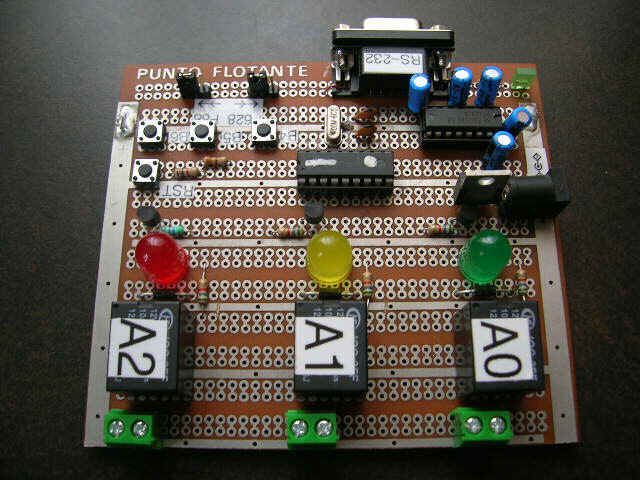
Descripción: Se describe el hardware y el firmware de una tarjeta para realizar funciones de Unidad Terminal Remota UTR controlada desde una PC a través de un cable serial DB9-DB9, usando el estándar RS232 y capacidad para manejar 3 salidas de relevador y 3 entradas de botones del tipo "push button". Se ejemplifica el uso de este circuito como controlador de un semáforo con capacidades de programación remota de los tiempos de encendido y apagado de sus 3 focos VERDE, AMARILLO y ROJO. El circuito funciona tanto para el microcontrolador 16F628, como el 16F88. Se utiliza un circuito MAX232 para el manejo de la interfaz serial RS232. La asignación de las señales TX/RX se configura a través de 2 jumpers para la compatibilidad con ambos microcontroladores 16F628 ó 16F88. |
| Usando la interfaz
RS232, la terminal remota puede manejarse a distancias de hasta 50 metros y velocidades de
9600 bps. Sin embargo,
mediante la
conversión al estándar RS422/RS485, pueden alcanzarse distancias de 1.2 kms. y
realizar control de redes multipunto, con la posibilidad de operar varias terminales
remotas desde una computadora central. El circuito cuenta con 3 leds del tipo JUMBO de 10 mm. y 3 relevadores de 1 polo 1 tiro con salidas de contacto seco de 127 volts @ 1 amp, para el manejo de los focos de 40 watts. Se realizaron varios programas de prueba en lenguaje ANSI C para la tarjeta, incluyendo el control remoto desde una computadora PC, usando el software de comunicaciones "Hyperterminal". Para esta última aplicación, puede usarse en la PC tanto una salida directa COM-DB9 ó un cable de interfaz USB-Serial. La asignación de puertos en el microcontrolador 16F628/16F88 es la siguiente:
DIAGRAMA ELECTRONICO: TerminalRemota.PDF En este diagrama se incluyen los patigramas de ambos microcontroladores 16F628 y 16F88. Usted puede elegir cualquiera de los dos. No olvide que los jumpers JP1 y JP2 deben configurarse según el microcontrolador empleado, para que las señales TX y RX del puerto serial funcionen correctamente. FIRMWARE: Se realizaron 3 programas de prueba en ANSI C, para el compilador CCS:
|
![]()